

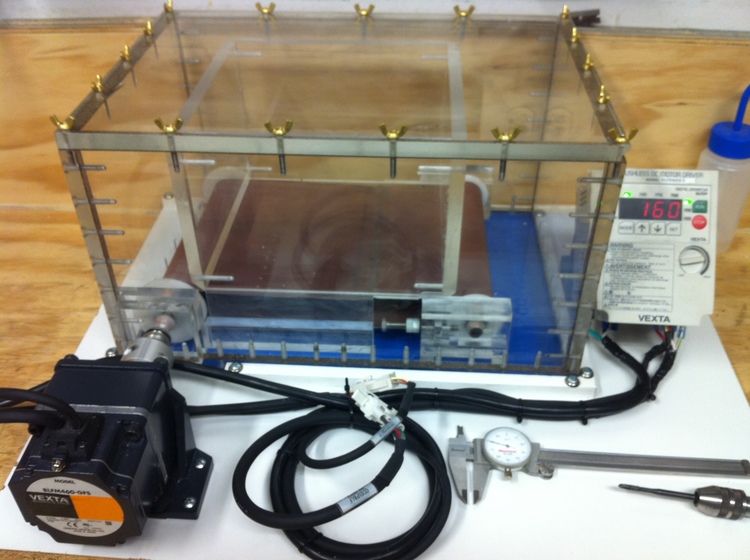
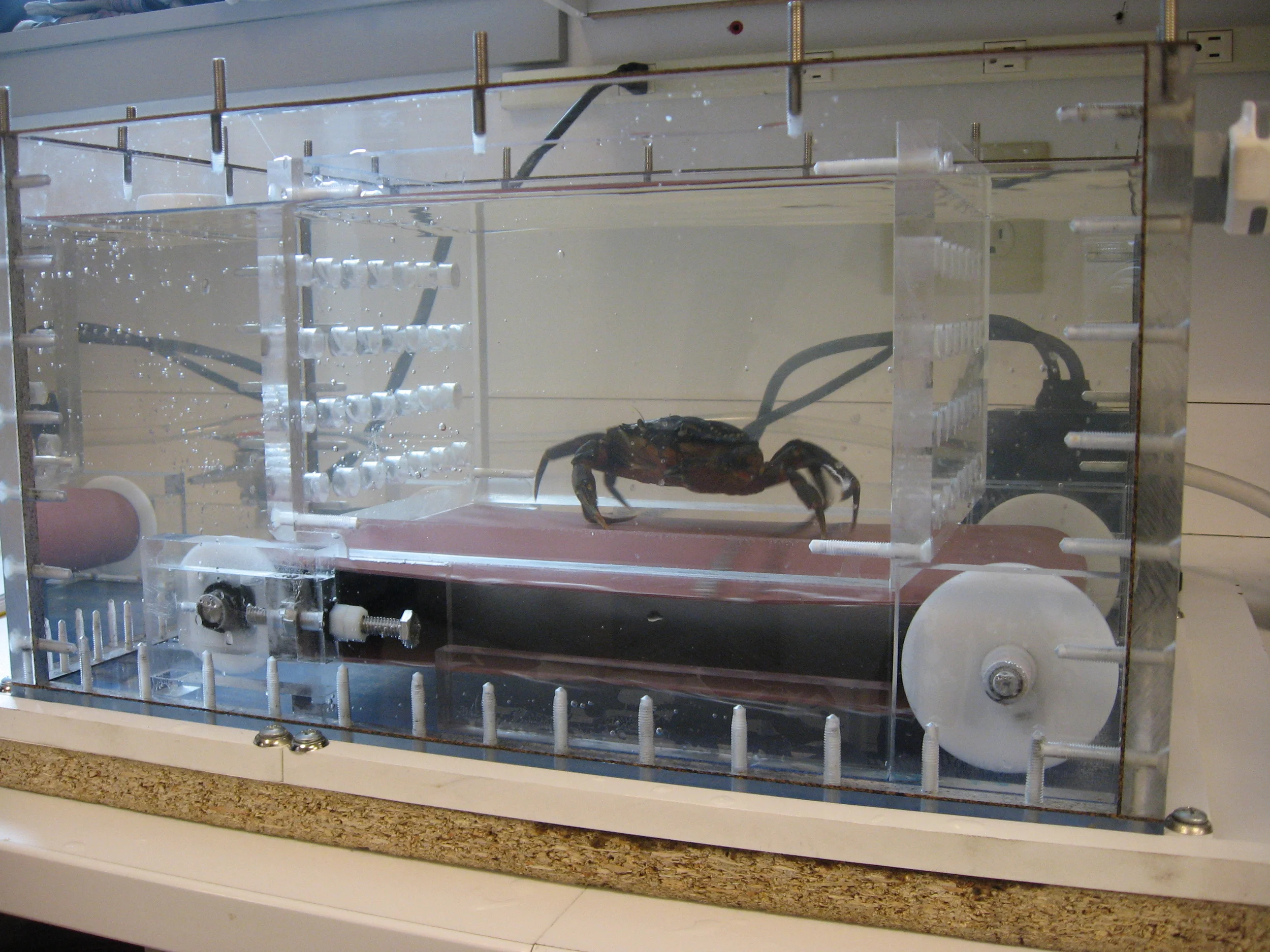
An undergraduate research assistant prepares to run a trial.
Variable Speed Crab Treadmill:
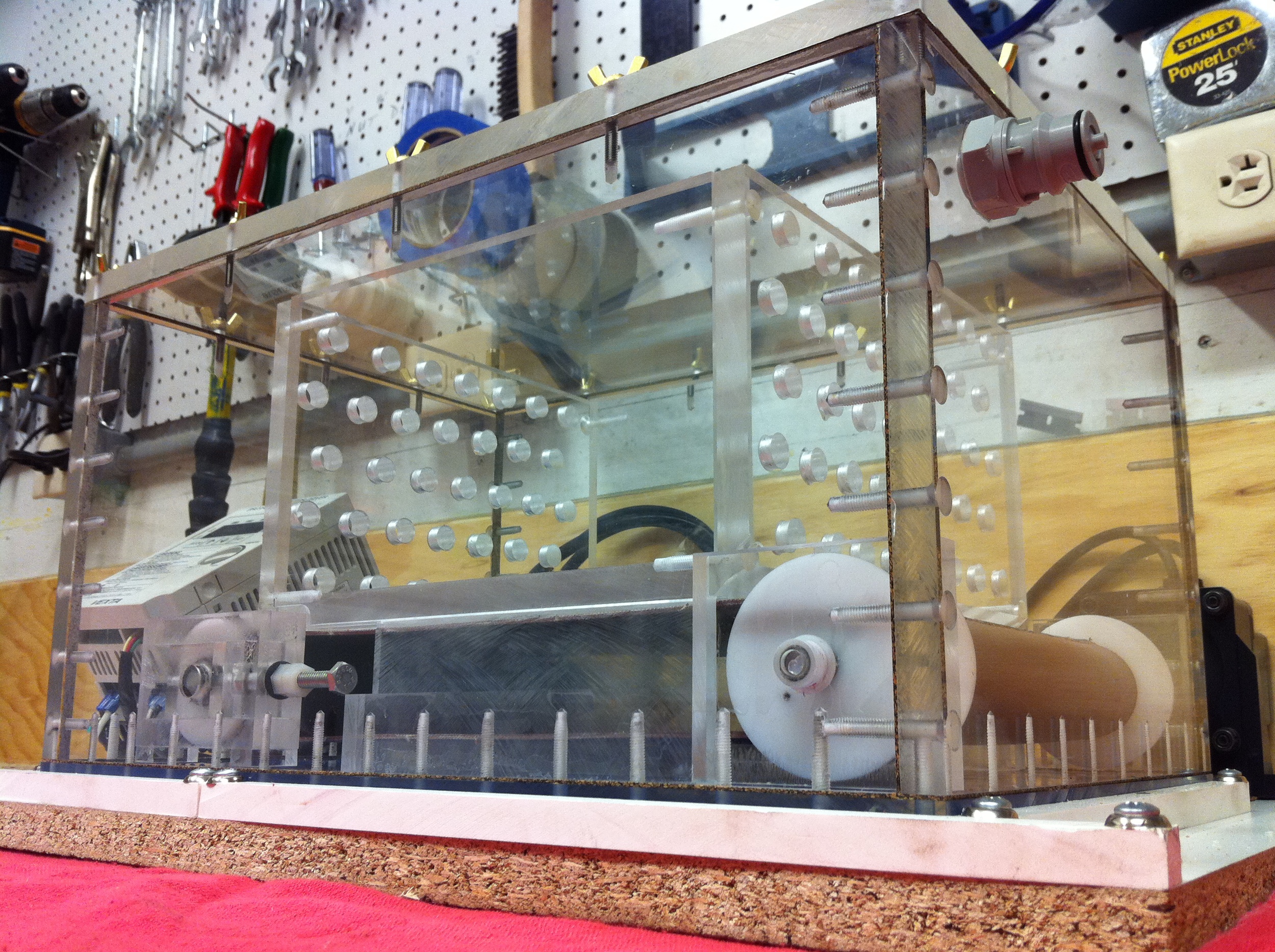
Technology: This design was inspired by the semi-infamous YouTube sensation “Shrimp on a Treadmill”. Except for the hardware and the brushless motor, all parts for this project were fabricated using manual machining equipment and a table saw. The project represents approximately 100 hours of build time and many more hours of rendering and research. Materials include delrin, acrylic, 316 stainless steel, brass, and nylon. 3D modeling helped determine optimal placement of the carbon/metallic seal and drive shaft. The belt was hand-stitched with Spectra thread and is tensioned and tracked by two custom slides with pressed delrin bearings. Quick disconnect fittings allow easy plumbing to a peristaltic pump (not pictured) that recirculates modified seawater throughout the chamber. The system can be fully closed and purged of ambient air through a valve on the lid. The entire system had to be capable of being disassembled for preventative maintenance, and also simple enough that students could maintain and operate it.
The completed treadmill prototype after its first bench test.
Science: When invasive species are introduced into a new environment, they can out-compete native species for food and resources, ultimately disturbing the balance within an ecosystem. Green crabs, Carinus maenas, introduced to US waters in the 1800’s, arrived by catching rides on European trading ships. Green crabs rapidly out-compete indigenous North American species and decimate ecologically and economically important species such as the soft shelled clam (aka Steamers). The treadmill was built for Professor Markus Frederich at the University of New England who was interested in marine invertebrate regulation of energy metabolism under stress. Understanding invasive species physiology helps predict how far the crabs will be able to spread within an ecosystem and how they can compete with native species. The treadmill creates a form of exercise, or stress, that helps manipulate the physiology of the crabs and study them under different treatment regimes.


The digital motor controller was programmed to determine the belt's acceleration and speed.